Project Title: Collective Efficient Deep Learning and Networked Control for Multiple Collaborative Robot Systems (DEEPCOBOT)
Aim of the project
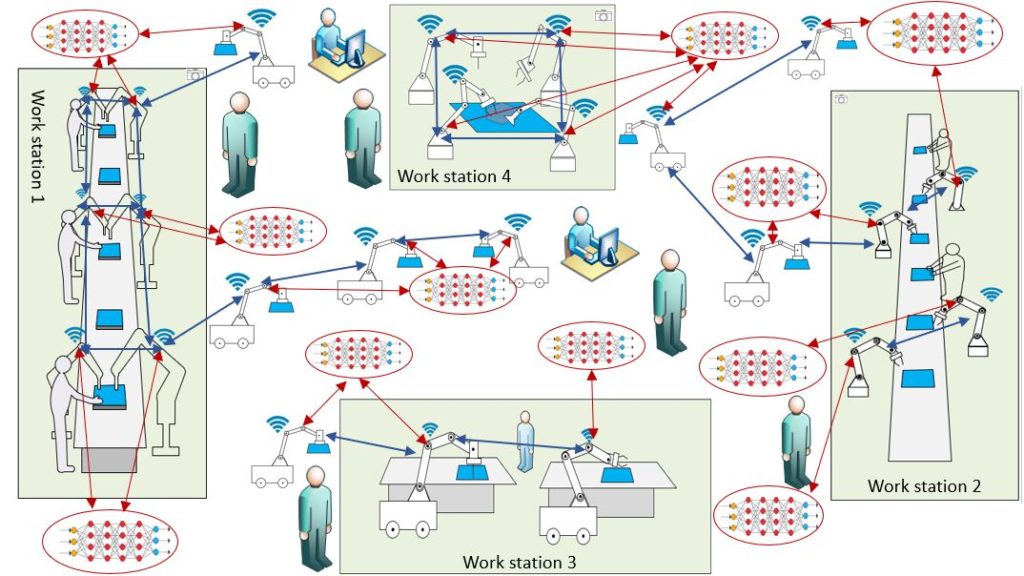
DEEPCOBOT project will investigate the design of a new generation of decentralized data-driven Deep Learning controllers for multiple coexisting collaborative robots (Cobot), which interact both between themselves and with human operators to collectively learn from each other’s experiences and perform cooperatively different complex tasks in large-scale industrial environments. This is motivated by the increasing demand for automation in industry, especially the demand for a safer and more efficient collaboration between multiple Cobots and human operators to integrate the best of human abilities and robotic automation.
The vision of this project is that the learning of the optimal local control policies can be substantially accelerated by sharing both information about previous experiences and computation across multiple neighbor Cobots connected through a wireless communication network, providing solutions that satisfy the necessary real-time constraints in the considered robotic applications, as well as providing sufficient robustness and interchangeability to the control solutions. This multidisciplinary project covers the areas of deep learning, optimization, reinforcement learning, decentralized shared control, embodied Artificial Intelligence (intelligent robots and devices), bi-directional interaction between Cobots and human operators, and cross-layer networking with significant potential in industrial applications.
Funding: Research Council of Norway
Total Budget: NOK 20 million
Period: 2020 – 2025
Industry Partners: ABB Norway, Mechatronics Innovation Lab (MIL), Omron Electronics
International Partners:
- University of California San Diego, USA
- KTH Royal Institute of Technology, Sweden
- University of Navarra, Spain
- Agency for Science, Technology and Research (A*STAR), Singapore