Ph.D. Researchers
- PhD: Jayant Singh
Project: Deep Reinforcement Learning and Control for Multi-Agent Collaboration with Cobots
- PhD: Emil Mühlbradt Sveen

Project: Learning-Based Control and Vision for Robots
- PhD: Nama Ajay Nagendra

Project: Adaptive distributed computation and networking for efficient learning across multiple collaborative agents
- Postdoctoral Fellow: Dinsha Vinod
- PhD (2020-2023) and Postdoctoral Fellow (203-2025): Siri Marte Schlanbusch

Postdoctoral Fellow: Mingda Zhu

Master and Bachelor Students
2025
Supervisory Control Design for a SES Vessel
Eskil Gresen Gaustad
2024
Master Thesis: Modeling and Control of Hybrid energy storage system for integrated use in industrial microgrids
Henrik Hansen Togba
Jakob Underdal Finnvold
Master thesis: Scanning and path planning for surface processing industrial tanks
Kevin Hermann Skaar
Rodion Solheim
2023
2023
- Master thesis in Mechatronics
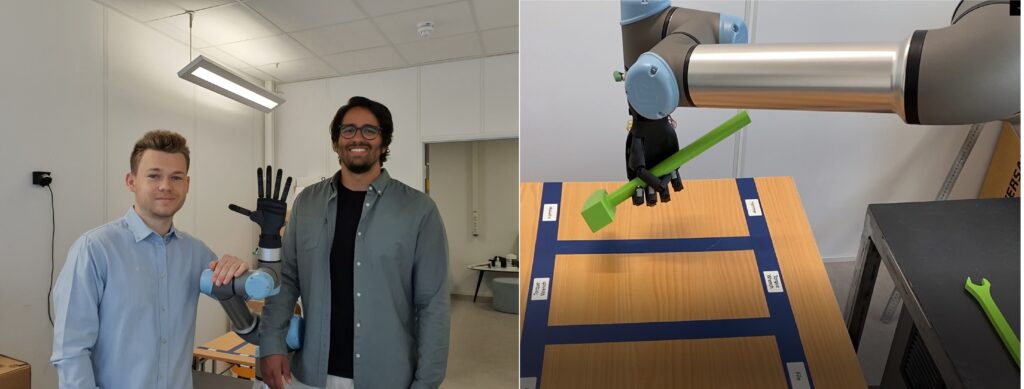
- Thesis title: “Design and Development of a Low-cost Anthropomorphic Gripper for Service Robotics and Prosthetic Applications”
- Students: Ravi Kumar and Jørgen Dale
- Supervisors: Prof. Jing Zhou and Jayant Singh
- Master thesis in Mechatronics & ICT
- Thesis title: Utilizing Reinforcement Learning and Computer Vision in a Pick-and-Place Operation for Sorting Objects in Motion
- Students: Kristoffer Sand and Trygve Andre Olsøy Solberg
- Main Supervisor: Emil Mühlbradt Sveen (main) and Per-Arne Andersen (Co)
- Master thesis in Mechatronics
- Thesis title: Robotic Picking in a Cluttered Environment Using Computer Vision
- Student: Rasmus Als Hansen
- Supervisors: Emil Mühlbradt Sveen (main) and Roy Werner Folgerø (co)
2022
- Master thesis in Mechatronics
Thesis title: Robot localization
Student: Espen Nilsen
- Bachelor thesis in Mechatronics
Thesis title: Collision Prediction System for Collaborative Robots
Students: Kevin Hermann Skaar, Rodion Solheim, Henrik Hoang
2021
- Master thesis in Mechatronics
Student: Tom Erik Vange
Thesis title: Model-free object grasping with a learning-free approach.
- Bachelor thesis in Mechatronics
Student Group: Eirik Magnus Skår, Benjamin Årøy Ims, Bjørn Enehaug
Thesis title: Human-Cobot Sequential Cooperation
- Bachelor thesis in Mechatronics
Student Group: Eirik Eidhammer, Ravi Kumar, Jan-Philip Radicke,
Thesis title: Multiple Robot Cell Operation using Robot Operating System.
