2025
- 🎉 Congratulations to Dr. Siri Marte Schlanbusch and Dr. Dinsha vinod:
📜 [1] Siri Marte Schlanbusch and Jing Zhou, “Predictor-Based Attitude Control for Rigid Body Systems with Input Delays,” Automatica.
📜 [2] Dinsha Vinod and Jing Zhou, “Adaptive Event-Triggered Control for Uncertain Polytopic NLPV Systems: An Application in Robotic Vision,” IEEE Transactions on Industrial Electronics.
- Prof. Jing Zhou delivered a keynote speech titled with “Data-Driven Adaptive and Quantized Control – Theory and Applications,” at the 13th International Conference on Control, Mechatronics and Automation (ICCMA 2025) in Paris, November 24–26, 2025, https://lnkd.in/dqmCfera.
🌟 My keynote talk, “Data-Driven Adaptive and Quantized Control – Theory and Applications,” was a wonderful opportunity to present recent developments in this area to an engaged, insightful, and truly inspiring community of researchers and practitioners. - 🥇 Congratulations to Lars Østerholt and co-authors: Are Gundersen, Jing Zhou, and Daniel Hagen receiving Best Paper Award, for the paper “Real-Time Markerless Vision-Based Control of Knuckle Boom Cranes via Embedded AI,” at ICCMA2025.
- Prof. Jing Zhou delivered a semi-plenary lecture at the 23rd European Control Conference (ECC2025) in 24-27 June, in beautiful Thessaloniki, Greece
Title of Talk: “Adaptive Control with Quantization”
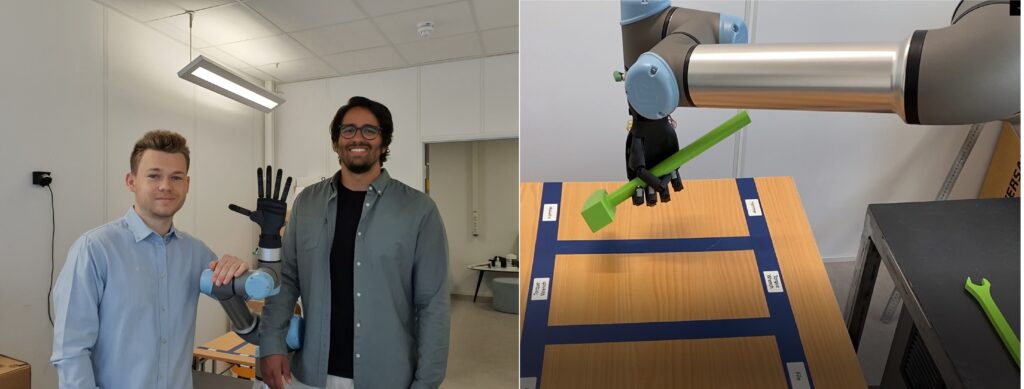
Thomas Lønne Stiansen and Adrian Ling: summer job at the Motion Lab UiA, with support from Johannes Eidsvik!
2024
Congratulations , Dr. Dinsha vinod, for receiving the Best Paper Presentation award in “Control systems and applications” session at the 50th Annual Conference of the IEEE Industrial Electronics Society (IECON 2024) in Chicago, Nov 3-6, 2024. The paper is titiled “An event-triggered MPC scheme for discrete pLPV systems: Application in auto-scaling of compute nodes in a fog cluster “.
Successful hosting of the 19th IEEE Conference on Industrial Electronics and Applications (ICIEA 2024) in beautiful Kristiansand, Norway, August 5-8, 2024.
General Chairs:
- Prof. Jing Zhou (UiA, Norway)
- Prof. Changyun Wen ( NTU, SIngapore)
- Prof. Juan Jose Rodriguez Andina ( IES President-Elect, Spain),
Keynote speakers:
Prof. Bruno Siciliano (University of Naples Federico II)
Prof. Ren Luo (National Taiwan University)
Prof. Mo-Yuen Chow (North Carolina State University)
Prof. Akshay Rathore, Professor, IEEE Fellow (Singapore Institute of Technology)
- Congratulations to Kevin Skaar and Rodion Solheim on completing an outstanding master project in Mechatronics, at UiA!
Title: Scanning and path planning for surface processing industrial tanks
– A general approach for efficient surface mapping and trajectory planning for surface processing, a new hope
2023
- Best Paper Award, Authors: Emil Mühlbradt Sveen and Jing Zhou, paper “Applications of Linear Adaptive Dynamic Programming (ADP) to a Non-linear Four-bar Mechanism”, at IEEE 11th International Conference on Control, Mechatronics and Automation (ICCMA2023), Campus Grimstad, University of Agder (UiA), Norway, November 1-3 2023
- Congratulations to my brilliant Posdoc Siri Marte Schlanbusch and PhDs Jayant Singh, Emil Mühlbradt Sveen, Ajay Nagendra Nama, and Ronny Landsverk for their outstanding paper presentations at the 49th Annual Conference of the IEEE Industrial Electronics Society (IES), IECON2023, October 16-19, 2023, Singapore.

- Prof. Jing Zhou delivered a talk at Women-in-Engineering at the 49th Annual Conference of the IEEE Industrial Electronics Society (IES), IECON2023, October 16-19, 2023, in Singapore.


- IEEE 11th International Conference on Control, Mechatronics and Automation (ICCMA2023), University of Agder (UiA), Grimstad, Norway, November 1-3 2023
We have successfully hosted the IEEE 11th International Conference on Control, Mechatronics and Automation (ICCMA2023) at our Campus Grimstad, University of Agder (UiA), Norway, during November 1-3. It was a truly valuable and gratifying experience for me to serve as the General Chair of ICCMA2023. I’m deeply grateful to the organizing committee, the keynote speakers, the invited speakers, and our distinguished participants for your dedication and contributions to the success of ICCMA2023.
The conference is co-sponsored by IEEE Robotics and Automation Society. http://www.iccma.org/

- Ph.D. Research Fellow Emil Mühlbradt Sveen won the Best Paper Award at ICCMA2023
The PhD Research Fellow Emil Mühlbradt Sveenwon the award for best paper presentation at the IEEE 11th International Conference on Control, Mechatronics and Automation (ICCMA), November 1-3, Norway, 2023.

- Master Thesis in Mechatronics in 2023
Master students in Mechatronics, Ravi Kumar and Jørgen Dale, are involved in the project “DEEPCOBOT”. The projects are supervised by Prof. Jing Zhou and Ph.D. Jayant Singh.
Title of Thesis: Design and Development of an Anthropomorphic Gripper for Service Robotics and Prosthetic Applications
The project investigates the design, development, and evaluation of a low-cost anthropomorphic gripper for advanced robotic applications. The following sections describe the creation of a fully functional robotic gripper through 3D printing and
assembly, as well as performance testing of the device. The system developed demonstrates the capability for pick and place operations with diverse objects. The results of this research and development indicate the potential for improved dexterity and adaptability in robotic manipulation tasks without costly hardware, paving the way for further advancements in human-robot interaction and automation.
- Master and Bachelor Thesis in Mechatronics in 2022
Master thesis: Robot Localization Master Student: Espen Nilsen
Bachelor Thesis: Collision Prediction System for Collaborative Robots
Bachelor Students: Kevin Hermann Skaar, Rodion Solheim, Henrik Hoang
- Ph.D. Research Fellow Siri Marte Schlanbusch won the Best Paper Presentation Award
The PhD Research Fellow Siri Marte Schlanbusch from Mechatronics won the award for best paper presentation at the IEEE 9th International Conference on Control, Mechatronics and Automation (ICCMA), November 11-14, 2021.
Under the supervision of Professor Jing Zhou, Siri has developed a new control algorithm for the attitude tracking of an uncertain 2-degrees of freedom helicopter system in the presence of both input and the state quantization.
The paper title is “Adaptive Backstepping Control of a 2-DOF Helicopter System in the Presence of Quantization”. Authors are Siri Marte Schlanbusch and Prof. Jing Zhou from Mechatronics, UiA.
IEEE International Conference on Control, Mechatronics and Automation (ICCMA) is an annual conference organized by IEEE Robotics and Automation Society. ICCMA provides a platform for researcher from universities and industries around the world to share the exciting ongoing advances in control, mechatronics and automation.
- Bachelor and Master Theses 2021
Bachelor and master students in Mechatronics are involved in the project “DEEPCOBOT”. The projects are supervised by Prof. Jing Zhou and Assoc. Prof. Ilya Tyapin. The bachelor’s and master students have worked together with PhD students Emil and Jayant.
- Bachelor Thesis title: Human-Cobot Sequential Cooperation
The objective of this bachelor project is to provide a solution to perform semi-autonomous collaborative tasks, between a robot and a human. The project is focused on making a usable autonomous solution, that will find a sequence of actions that will lead to a desired goal. The tasks include solving different planning problems such as identifying objects, picking and placing objects, moving around in a known environment, and interacting with the environment to complete its goal. To achieve these tasks it was necessary to make new software for the robot to run. All programming was done within the ROS framework. By using ROS melodic, Linux Ubuntu 18.04, and Python programming language. The majority of all testing was in simulation using the Gazebo, testing was done on the physical robot when simulation was satisfactory.

Students: Eirik Magnus Skår, Benjamin Årøy Ims and Bjørn Enehaug
Thesis title: Human-Cobot Sequential Cooperation

Students: Ravi Kumar, Jan-Philip Radicke, Eirik Eidhammer
Bachelor Thesis: Multi Robot Cell Operation using Robot Operating System
Bachelor Thesis: Multi Robot Cell Operation using Robot Operating System
This project contains the work for a bachelor’s thesis at the University of Agder (UiA) in spring 2021. With cobots being the fastest growing segment of industrial automation, this thesis will investigate a multi robot cell operation. This cell consists of the Universal Robot 5 (UR5) and TIAGo. This project was carried out with the use of Robot Operating System (ROS) with the Melodic Morenia distribution along side Linux Ubuntu 18.04. The goal of this thesis is to make these cobots perform a pick and place operation in a fast and effective
manner. TIAGo will identify an object, pick it up, and navigate to the UR5. Then, UR5 will detect the object and store it. This task is performed both in simulation, as well as on a physical setup.
Master Thesis: Model-free object grasping with a learning-free approach
Student: Tom Erik Vange
The industry standards and capability are constantly advancing and pushing forward to increase data collection, efficiency, profit, and quality as well as decrease downtime, injuries, and hazards as much as possible. In recent years, robot systems have received more attention in the context of a large number of industrial applications, such as automotive manufacturing, additive manufacturing, assembly, quality inspection, and co-packing. The collaboration between multiple robots and human operators is considered to be the most prominent strategy in Industry 4.0 and future Industry 5.0, sharing the same space and collaborating on tasks according to their complementary capabilities. With the use of robots and their abilities could efficiency, profit, safety, and quality be further increased, potentially revolutionizing the industry and production.
This project has looked into the problem of grasping an unknown and previously unseen object with a learning-free approach. By implementing a model-free picking algorithm onto a robot arm with a gripper and robot vision could it be able to pick up a vast variety of objects. A virtual environment has been created with a robot arm and depth-camera during this project. The result from this project is a setup that is able to scan objects placed on a workbench and create a point cloud representation of these objects. The point cloud is since used to calculate the curvature of the objects, creating a foundation for further use in a learning-free setup for grasping previously unseen objects.

